|
|
|
ИНДУКТИВНЫЕ И МАГНИТНЫЕ ДАТЧИКИОчевидно, что вихретоковые детекторы не рекомендуется применять для работы с металлизированными пленками и фольгой. Обычно зависимость между импедансом катушки и расстоянием до объекта х является нелинейной и температурочувствительной. Диапазон рабочих частот вихретоковых детекторов лежит в диапазоне 50 кГц... 10 МГц. 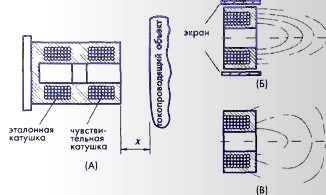 Рис.7.11. А — электромагнитный датчик приближения, Б — экранированный
датчик, В — неэкра-нированный датчик
Рис.7.11. А — электромагнитный датчик приближения, Б — экранированный
датчик, В — неэкра-нированный датчик
На рис. 7.11Б и 7.11В отображены две конфигурации вихретоковых сенсоров: с экранированием и без. В состав экранированного датчика входит металлический кожух вокруг ферритового сердечника и катушек. Он фокусирует электромагнитное поле на переднюю часть датчика. Это позволяет встраивать датчики такого типа в металлические структуры без изменения диапазона измерений. Неэкранированный датчик обладает чувствительностью к перемещению не только с переднего конца, но и с боковых сторон. Поэтому диапазон измерения неэкранированного датчика несколько выше, чем у экранированного точно такого же диаметра. Для корректной работы в окружении неэкранированного датчика не должно быть металлических объектов. Вихретоковые датчики могут не только определять положение объектов, но также измерять толщину материалов, толщину непроводящих покрытий, удельную проводимость и дефекты в изделиях. Дефектоскопия — это наиболее популярная область применения сенсоров данного типа. В некоторых случаях используются не две, а большее число катушек: одна часть из них имеет очень маленький диаметр (2–3 мм), а другая — довольно большой (25 мм). Некоторые производители изготавливают вихретоковые детекторы с уникальными характеристиками под конкретные заказы (к примеру, Staveley instruments, Inc.Kennewick, WA). Главное достоинство таких электромагнитных детекторов заключается в том, что они не нуждаются в магнитных материалах, и за счет этого они могут работать достаточно эффективно при высоких температурах (значительно превышающих температуру Кюри для магнитных материалов), поэтому они часто применяются для измерения уровней расплавленных металлов и других проводящих жидкостей. Другое достоинство вихретоковых сенсоров — отсутствие механической связи с объектом, поэтому нагрузка практически никак не влияет на их работу. Поперечный индуктивный датчик Другое устройство для определения положения объекта называется поперечным индуктивным датчиком приближения. Этот датчик применяется для измерения сравнительно небольших перемещений объектов из ферромагнитных материалов Как рекомендуется из названия, такой детектор определяет расстояние до объекта, оказывающего влияние на магнитное поле в катушке. Индуктивность катушки измеряется при помощи внешней электронной схемы (рис. 7.12). Принцип действия такого преобразователя основан на явлении самоиндукции. При попадании ферромагнитного объекта в окрестность датчика приближения, его магнитное поле изменяется, что приводит к изменению индуктивности катушки. Поскольку взаимодействие с объектом осуществляется только через магнитное поле, этот преобразователь является бесконтактным устройством, чго является несомненным его достоинством. К недостаткам таких сенсоров относится то, что они могут работать только с ферромагнитными объектами и измерять лишь небольшие расстояния. Рис. 7.12. Поперечный индуктивный датчик приближения 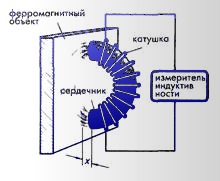 На рис. 7.1 ЗА отображена модифицированная конструкция того же
датчика. Для преодоления первого ограничения здесь на перемещающийся объект
прикрепляется ферромагнитный диск, а катушка находится в стационарном
положении. Существует и другая версия такого устройства: катушка прикрепляется
к объекту, а сердечник фиксируется. Но такие устройства, по-прежнему, могут
определять только небольшие перемещения, и к тому же они обладают довольно
плохой линейностью по сравнению с ЛРДТ. Однако они с успехом могут применяться
в качестве детекторов приближения, сигнализирующих о близком нахождении
объектов, изготовленных из любых твердых материалов. На рис. 7.13Б отображена
зависимость выходного сигнала от расстояния до диска.
На рис. 7.1 ЗА отображена модифицированная конструкция того же
датчика. Для преодоления первого ограничения здесь на перемещающийся объект
прикрепляется ферромагнитный диск, а катушка находится в стационарном
положении. Существует и другая версия такого устройства: катушка прикрепляется
к объекту, а сердечник фиксируется. Но такие устройства, по-прежнему, могут
определять только небольшие перемещения, и к тому же они обладают довольно
плохой линейностью по сравнению с ЛРДТ. Однако они с успехом могут применяться
в качестве детекторов приближения, сигнализирующих о близком нахождении
объектов, изготовленных из любых твердых материалов. На рис. 7.13Б отображена
зависимость выходного сигнала от расстояния до диска.
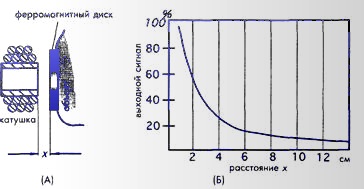 Рис. 7.13. Поперечный датчик приближения с дополнительным
ферромагнитным диском (А) и зависимость выходного сигнала от расстояния (Б)
Рис. 7.13. Поперечный датчик приближения с дополнительным
ферромагнитным диском (А) и зависимость выходного сигнала от расстояния (Б)
Датчики приближения, использующие эффект Холла За последние годы популярность сенсоров Холла значительно увеличилась (см. раздел 3.8 главы 3, где описан их принцип действия). Индуктивные датчики, в которых для изменения сопротивления магнитного контура используются различные ферромагнитные материалы, называются преобразователями магнитного сопротивления [4]. Индукционный преобразователь, как правило, состоит из двух катушек: первичной и вторичной. На первичную катушку подается переменное опорное напряжение V индуцирующее переменное напряжение ^оц,во вторичной катушке (рис. 7.9). Амплитуда V зависит от величины потокосцепления между двумя катушками. Существует два способа изменения потокосцепления. Один из них — перемещение объекта, изготовленного из ферромагнитного материала, внутри магнитного контура. Это приводит к изменению магнитного сопротивления между катушками, что, в свою очередь, вызывает изменение потокосцепления. На этом принципе реализуются ЛРДТ, ПРДТ и индуктивные датчики приближения. Другой метод заключается в физическом перемещении одной катушки относительно другой. ЛРДТ — это трансформатор с механически управляемым сердечником. На его первичную обмотку подается синусоидальное напряжение постоянной амплитуды. Применение синусоидального сигнала позволяет избавиться от паразитных гармоник [5]. На вторичных обмотках индуцируется переменное напряжение. В цилиндрическое отверстие между катушками вставляется сердечник из ферромагнитного материала. При этом сердечник не касается обмоток. Две вторичные обмотки включены в противофазе. Когда сердечник расположен в центре трансформатора, выходные сигналы вторичных катушек взаимно уничтожают друг друга, поэтому на выходе трансформатора нет никакого напряжения. Перемещение сердечника в сторону от центрального положения приводит к изменению магнитных потоков во вторичных обмотках. В результате возникшего разбаланса появляется выходное напряжение. Изменение магнитных потоков происходит за счет изменения магнитных 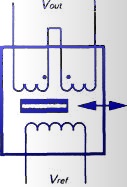 Рис. 7.9. Принципиальная схема ЛРДТ
сопротивлений пространства между катушками. Из всего
вышесказанного рекомендуется, что величина потокосцепления определяется осевым
положением сердечника. В линейной рабочей области в стационарном режиме
амплитуда индуцированного сигнала пропорциональна смещению сердечника. Поэтому
выходное напряжение может служить мерой перемещения. Выходной сигнал ЛРДТ не только
показывает величину перемещения, но и его направление. Направление перемещения
определяется фазовым углом между опорным и выходным напряжением. Опорное
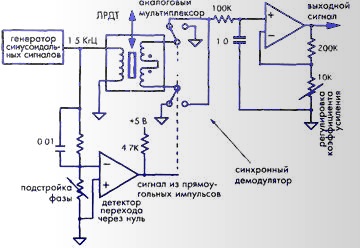
напряжение вырабатывается стабилизированным генератором. На рис. 7.10 отображен
ЛРДТ, соединенный с синхронным демодулятором, используемым для выпрямления
синусоидального сигнала и представления его в виде выходного постоянного
напряжения. Синхронный демодулятор состоит из аналогового мультиплексора и
детектора пересечения нулевого уровня, преобразующего синусоидальный сигнал в
прямоугольные импульсы, управляющие мультиплексором. Фаза сигнала детектора
настраивается так, чтобы при нахождении сердечника в центральном положении
выходное напряжение равнялось нулю. Выходной усилитель преобразует выходной сигнал
к виду, совместимому с последующими схемами. Величина напряжения на выходе
устройства соответствует расстоянию от сердечника до центральной точки, а его
знак — направлению смещения.
Рис. 7.10. Упрощенная схема датчика перемещений на основе
ЛРДТ с интерфейсом
Рис. 7.9. Принципиальная схема ЛРДТ
сопротивлений пространства между катушками. Из всего
вышесказанного рекомендуется, что величина потокосцепления определяется осевым
положением сердечника. В линейной рабочей области в стационарном режиме
амплитуда индуцированного сигнала пропорциональна смещению сердечника. Поэтому
выходное напряжение может служить мерой перемещения. Выходной сигнал ЛРДТ не только
показывает величину перемещения, но и его направление. Направление перемещения
определяется фазовым углом между опорным и выходным напряжением. Опорное
напряжение вырабатывается стабилизированным генератором. На рис. 7.10 отображен
ЛРДТ, соединенный с синхронным демодулятором, используемым для выпрямления
синусоидального сигнала и представления его в виде выходного постоянного
напряжения. Синхронный демодулятор состоит из аналогового мультиплексора и
детектора пересечения нулевого уровня, преобразующего синусоидальный сигнал в
прямоугольные импульсы, управляющие мультиплексором. Фаза сигнала детектора
настраивается так, чтобы при нахождении сердечника в центральном положении
выходное напряжение равнялось нулю. Выходной усилитель преобразует выходной сигнал
к виду, совместимому с последующими схемами. Величина напряжения на выходе
устройства соответствует расстоянию от сердечника до центральной точки, а его
знак — направлению смещения.
Рис. 7.10. Упрощенная схема датчика перемещений на основе
ЛРДТ с интерфейсом
 Для точного определения величины перемещений частота
генератора должна быть, по крайней мере, на порядок выше максимальной частоты
движения. При медленно меняющихся процессах стабилизированный генератор можно
заменить подсоединением к сети, частота той равна либо 60, либо 50 Гц.
ЛРДТ и ПРДТ обладают следующими достоинствами:
1. Датчики, реализованные на их основе, являются
бесконтактными устройствами, с практически нулевыми потерями на трение.
2. Незначительным гистерезисом как магнитным, так и механическим.
3. Очень низким выходными импедансом.
4. Высокой помехоустойчивостью.
5. Прочной и надежной конструкцией.
6. Очень высокой разрешающей способностью.
Примером сенсоров перемещений на основе ЛРДТ является так
называемая измерительная головка, применяемая во многих видах тестового
оборудования. В таких системах внутренний сердечник ЛРДТ подвешен на пружине,
возвращающей измерительную головку в исходное положение.
ПРДТ работают на том же принципе, что и ЛРДТ, за исключением
того, что в них используются вращающиеся сердечники. Основное применение ПРДТ —
измерение угловых перемещений. Линейный диапазон измерений таких сенсоров
составляет порядка ±40° с погрешностью нелинейности около 1%.
Для точного определения величины перемещений частота
генератора должна быть, по крайней мере, на порядок выше максимальной частоты
движения. При медленно меняющихся процессах стабилизированный генератор можно
заменить подсоединением к сети, частота той равна либо 60, либо 50 Гц.
ЛРДТ и ПРДТ обладают следующими достоинствами:
1. Датчики, реализованные на их основе, являются
бесконтактными устройствами, с практически нулевыми потерями на трение.
2. Незначительным гистерезисом как магнитным, так и механическим.
3. Очень низким выходными импедансом.
4. Высокой помехоустойчивостью.
5. Прочной и надежной конструкцией.
6. Очень высокой разрешающей способностью.
Примером сенсоров перемещений на основе ЛРДТ является так
называемая измерительная головка, применяемая во многих видах тестового
оборудования. В таких системах внутренний сердечник ЛРДТ подвешен на пружине,
возвращающей измерительную головку в исходное положение.
ПРДТ работают на том же принципе, что и ЛРДТ, за исключением
того, что в них используются вращающиеся сердечники. Основное применение ПРДТ —
измерение угловых перемещений. Линейный диапазон измерений таких сенсоров
составляет порядка ±40° с погрешностью нелинейности около 1%.
Вихретоковые датчики На рис. 7.11А отображен датчик, состоящий из двух катушек, использующий вихревые токи для детектирования приближения объектов из немагнитных, но проводящих материалов. Одна из катушек является эталонной, а другая — чувствительной, реагирующей на вихревые токи, индуцируемые в проводящем объекте. Вихревые (круговые) токи формируют магнитное поле, направленное навстречу полю чувствительной катушки, приводящее к разбалансу между двумя катушками. Чем ближе объект придвигается к катушке, тем больше изменяется магнитное сопротивление. Толщина слоя, в котором циркулируют вихревые токи, определяется следующим выражением: где/ — частота, а а — удельная проводимость объекта. Для эффективной работы датчика толщина объекта должна быть больше величины 8. Одним из основных достоинств магнитных сенсоров перемещений является то, что магнитное поле может проникать через все немагнитные материалы без потери точности определения расстояния до объекта. Это означает, что какая не была преграда между датчиком и объектом: из нержавеющей стали, алюминия, латуни, меди, пластмассы, камня или дерева, расстояние между ними будет определено практически мгновенно. Другое достоинство магнитных сенсоров заключается в том, что они могут работать в суровых условиях окружающей среды и им не страшна коррозия, поскольку и детекторы, и объекты при необходимости покрывают инертными материалами, не оказывающими никакого влияния на магнитные поля. Линейно-регулируемые дифференциальные трансформаторы (ЛРДТ) и поворотно-регулируемые дифференциальные трансформаторы (ПРДТ) Некоторые датчики положения и перемещений используют принцип электромагнитной индукции. При движении объекта между двумя катушками меняется магнитный поток. Это изменение потока может быть преобразовано в напряжение. Существуют два типа сенсоров Холла: линейный и пороговый (рис. 7.14). Линейный датчик обычно интегрируется вместе с усилителем для упрощения согласования с последующими схемами. По сравнению с основным датчиком (рис. 3.30 главы 3) они работают в большем диапазоне напряжений и обладают более хорошей помехозащищенностью. Но эти датчики не отличаются хорошей линейностью зависимости выходного напряжения от плотности магнитного поля (рис. 7.15А), поэтому для получения точных результатов необходимо проводить их индивидуальную калибровку. В дополнение к усилителю в состав порогового датчика входит триггер Шмитга, обладающий гистерезисом. На рис. 7.15Б отображена зависимость выходного сигнала порогового датчика от плотности магнитного поля. Как видно из рисунка, такой датчик обладает гистерезисом. Когда плотность приложенного магнитного поля превышает заданный пороговый уровень, триггер переключается из состояния выключено в положение включено, что свидетельствует о критическом приближении объекта к детектору. Гистерезис за счет введения мертвой зоны, запрещающей работу датчика после прохождения порогового значения, устраняет паразитные колебания. Датчики Холла обычно изготавливаются в виде интегральных схем на кремниевых подложках в бескорпусном или корпусном исполнении. 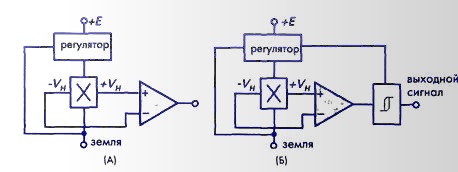 Рис. 7.14. Схемы линейного (А) и порогового (Б) датчика
Холла
Рис. 7.14. Схемы линейного (А) и порогового (Б) датчика
Холла
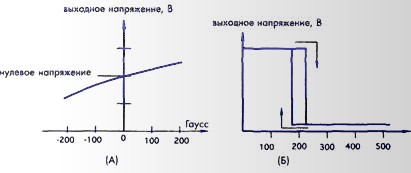 Гаусс
Рис. 7.15. Передаточные функции линейного (А) и порогового
(Б) датчика Холла
Для возможности измерения положения и перемещения объектов
датчику Холла необходим источник магнитного поля, а также интерфейсная схема. В этом случае датчик Холла и магнит представляют собой единый блок с некрупным
воздушным зазором между ними (рис. 7.16). Часто вся конструкция монтируется в
одном корпусе, что помогает устранить процедуру выравнивания элементов друг
относительно друга. При свободном воздушном зазоре датчик находится в положении
ВКЛЮЧЕНО. Когда в пространство между магнитом и датчиком помещается
ферромагнитная пластина, она формирует магнитный шунт, закорачивающий магнитный
поток на себя, в результате чего детектор Холла переходит в состояние
ВЫКЛЮЧЕНО. Ферромагнитная пластина, разрывающая магнитный поток, может
совершать либо линейные, либо вращательные движения. Примером такого устройства
является автомобильный прерыватель.
Гаусс
Рис. 7.15. Передаточные функции линейного (А) и порогового
(Б) датчика Холла
Для возможности измерения положения и перемещения объектов
датчику Холла необходим источник магнитного поля, а также интерфейсная схема. В этом случае датчик Холла и магнит представляют собой единый блок с некрупным
воздушным зазором между ними (рис. 7.16). Часто вся конструкция монтируется в
одном корпусе, что помогает устранить процедуру выравнивания элементов друг
относительно друга. При свободном воздушном зазоре датчик находится в положении
ВКЛЮЧЕНО. Когда в пространство между магнитом и датчиком помещается
ферромагнитная пластина, она формирует магнитный шунт, закорачивающий магнитный
поток на себя, в результате чего детектор Холла переходит в состояние
ВЫКЛЮЧЕНО. Ферромагнитная пластина, разрывающая магнитный поток, может
совершать либо линейные, либо вращательные движения. Примером такого устройства
является автомобильный прерыватель.
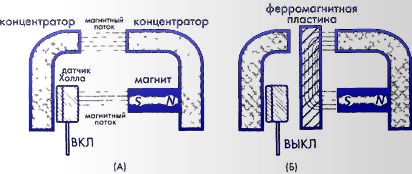 Рис. 7.16. Прерыватель, реализованный на основе датчика
Холла: А — магнитный поток включает датчик, Б — магнитный поток шунтируется
ферромагнитной пластиной [6]
Для детектирования линейных и круговых перемещений четыре
датчика Холла включаются в мостовую схему. На рис. 7.17А и 7.17Б отображены
внешний вид и принципиальная схема мостового датчика Холла для измерения
угловых перемещений, изготовленного на одном кристалле по микросистемной
технологии в пластмассовом корпусе SOIC-8. Схема детектирует угол и направление
поворота кругового магнита, размещенного сверху кристалла, и преобразует
полученные данные в цифровой код. Параметры АЦП определяют частотные
характеристики системы. Рассматриваемый датчик может работать при скорости
вращения магнита, равной 30 000 оборотов в минуту. Такое устройство позволяет
точно определять линейное и угловое положение объекта, выполнять угловую
кодировку и даже реализовать управляемый поворотный переключатель. Благодаря
мостовой схеме включения сенсоров, вся система устойчива к смещениям магнита и
внешним помехам, включая посторонние магнитные поля.
Рис. 7.16. Прерыватель, реализованный на основе датчика
Холла: А — магнитный поток включает датчик, Б — магнитный поток шунтируется
ферромагнитной пластиной [6]
Для детектирования линейных и круговых перемещений четыре
датчика Холла включаются в мостовую схему. На рис. 7.17А и 7.17Б отображены
внешний вид и принципиальная схема мостового датчика Холла для измерения
угловых перемещений, изготовленного на одном кристалле по микросистемной
технологии в пластмассовом корпусе SOIC-8. Схема детектирует угол и направление
поворота кругового магнита, размещенного сверху кристалла, и преобразует
полученные данные в цифровой код. Параметры АЦП определяют частотные
характеристики системы. Рассматриваемый датчик может работать при скорости
вращения магнита, равной 30 000 оборотов в минуту. Такое устройство позволяет
точно определять линейное и угловое положение объекта, выполнять угловую
кодировку и даже реализовать управляемый поворотный переключатель. Благодаря
мостовой схеме включения сенсоров, вся система устойчива к смещениям магнита и
внешним помехам, включая посторонние магнитные поля.
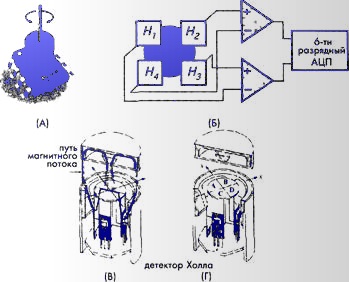 Рис. 7.17. Мостовой датчик Холла (А) и его внутренний
интерфейс (Б) (напечатано с разрешения Austria Micro Systems). Вид датчика и
перемещающегося объекта в разрезе: В — отображены пути магнитных потоков через
датчик и объект, Г — отображены пути четырех потоков при достаточной удалении
объекта
Рис. 7.17. Мостовой датчик Холла (А) и его внутренний
интерфейс (Б) (напечатано с разрешения Austria Micro Systems). Вид датчика и
перемещающегося объекта в разрезе: В — отображены пути магнитных потоков через
датчик и объект, Г — отображены пути четырех потоков при достаточной удалении
объекта
На рис. 7.17В и 7.17Г отображен трехмерный (3D) датчик Холла, сравнивающий магнитные потоки от перемещающегося объекта, проходящие по четырем геометрически одинаковым магнитным траекториям, расположенным симметрично вокруг вертикальной оси системы. Эта схема является магнитным эквивалентом моста Уитстона. Когда объект находится вдали от датчика, симметричное поле постоянного магнита распространяется от центрального полюса через воздушный зазор к краям. При приближении объекта к датчику траектория магнитных потоков меняется, они теперь проходят через обе структуры. Поверхность центрального полюса датчика сайтена на четыре равные части: А, В, С и D. Величины магнитных потоков в каждой из частей измеряются соответствующим детектором Холла. Магнитное поле характеризуется двумя основными параметрами: плотностью потока и полярностью (направленностью). рекомендуется отметить, что для повышения чувствительности желательно, чтобы линии магнитного поля были перпендикулярны плоской поверхности датчика и имели заданную направленность. В пороговых датчиках фирмы Sprague® южный полюс магнита отвечает за переключение датчика, в то время как северный полюс не оказывает никакого влияния. Перед разработкой датчика перемещений на основе детектора Холла необходимо провести полный предварительный анализ. Начинать необходимо с оценки силы магнитного поля. С увеличением расстояния от поверхности полюсов сила поля уменьшается. Силу поля можно определить либо при помощи измерителя магнитной индукции или калиброванного датчика Холла. Для датчика Холла порогового типа максимальное расстояние, при котором происходит переход выходного сигнала датчика из состояния включено (высокий уровень) в состояние выключено (низкии уровень), называется точкой отпускания. Эта точка определяет критическое расстояние, на котором может работать датчик. Зависимость силы магнитного поля от расстояния не яатяется линейной. Эта зависимость во многом определяется формой используемых магнитов, магнитным контуром и траекторией перемещения магнита. Чувствительный элемент датчика Холла располагается внутри корпуса на некотором расстоянии от его стенок. Это расстояние и определяет минимальное рабочее расстояние. Магнит должен быть надежным и обеспечивать эффективный воздушный зазор в рабочей зоне. Его габариты должны соответствовать величиным установки, а цена сопоставима со стоимостью всей системы (Для получения большей информации по постоянным магнитам обратитесь к разделу 3.4 главы 3). Датчики Холла могут использоваться в качестве прерывателей. Существует два типа объектов: пассивный и активный. В состав активного устройства входит постоянный магнит, возбуждающий магнитное поле, детектируемое датчиком, когда они находятся друг от друга на рабочем расстоянии. 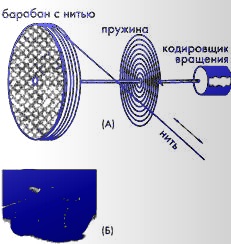 Рис. 7.18. Преобразование линейного перемещения (длины нити
или кабеля) во вращательное движение (А) и внешний вид датчика длины кабеля (Б)
Пассивные объекты не имеют собственного магнита. В этом
случае магнитное поле генерируется датчиком, а объект лишь возвращает его
обратно. Система управления беспилотным транспортным средством — яркий пример
использования такой конструкции. В таких системах под поверхностью дороги
расположены металлические полоски, играющие роль пассивных задающих устройств. При этом сам датчик располагается на транспортном средстве. При прохождении
датчика над задающими полосками снимается информация о положении, скорости и
направлении движения. Расстояние между датчиком и полосками не должно превышать
нескольких дюймов.
Из рисунков 7.17А и 7.17Б видно, что мостовые схемы сенсоров
Холла позволяют с высокой степенью точности преобразовывать круговое движение в
цифровой код. Используя это свойство, можно реализовать датчики перемещения на
основе преобразователя линейного перемещения в круговое движение (рис. 7.18). Неоднородности в пластине, к примеру, отверстия и области немагнитного
материала, нарушают магнитное поле и вызывают изменения выходного сигнала
датчика. На рис. 7.20 отображены выходные сигналы при разном расстоянии d между
пластиной и магнитом. При совмещении отверстия и датчика сигнал на его выходе
становится равным нулю, независимо ни от расстояния d, ни от окружающей
температуры.
На рис. 7.21 отображен способ применения того же датчика для
измерения угловых перемещений. В данном устройстве магнитное поле создается
двумя постоянными магнитами RES 190, закрепленными на вращающейся рамке, между
которыми размещен датчик. Выходной сигнал датчика соответствует угловому
перемещению рамки.
На рис. 7.22А отображена схема определения угла и направления
поворота зубчатого колеса при помощи датчика КМ110. Метод определения
направления вращения основывается на раздельной обработке выходных сигналов
датчика, снимаемых с двух половин мостовой схемы.
Рис. 7.18. Преобразование линейного перемещения (длины нити
или кабеля) во вращательное движение (А) и внешний вид датчика длины кабеля (Б)
Пассивные объекты не имеют собственного магнита. В этом
случае магнитное поле генерируется датчиком, а объект лишь возвращает его
обратно. Система управления беспилотным транспортным средством — яркий пример
использования такой конструкции. В таких системах под поверхностью дороги
расположены металлические полоски, играющие роль пассивных задающих устройств. При этом сам датчик располагается на транспортном средстве. При прохождении
датчика над задающими полосками снимается информация о положении, скорости и
направлении движения. Расстояние между датчиком и полосками не должно превышать
нескольких дюймов.
Из рисунков 7.17А и 7.17Б видно, что мостовые схемы сенсоров
Холла позволяют с высокой степенью точности преобразовывать круговое движение в
цифровой код. Используя это свойство, можно реализовать датчики перемещения на
основе преобразователя линейного перемещения в круговое движение (рис. 7.18). Неоднородности в пластине, к примеру, отверстия и области немагнитного
материала, нарушают магнитное поле и вызывают изменения выходного сигнала
датчика. На рис. 7.20 отображены выходные сигналы при разном расстоянии d между
пластиной и магнитом. При совмещении отверстия и датчика сигнал на его выходе
становится равным нулю, независимо ни от расстояния d, ни от окружающей
температуры.
На рис. 7.21 отображен способ применения того же датчика для
измерения угловых перемещений. В данном устройстве магнитное поле создается
двумя постоянными магнитами RES 190, закрепленными на вращающейся рамке, между
которыми размещен датчик. Выходной сигнал датчика соответствует угловому
перемещению рамки.
На рис. 7.22А отображена схема определения угла и направления
поворота зубчатого колеса при помощи датчика КМ110. Метод определения
направления вращения основывается на раздельной обработке выходных сигналов
датчика, снимаемых с двух половин мостовой схемы.
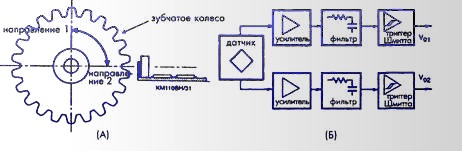 Рис. 7.22. А — оптимальное рабочее положение
магниторезистивного модуля. Отметим, что магнит находится за датчиком, Б — принципиальная
схема модуля
Модуль работает также как и магнитный мост Уитстона,
измеряющий напряженность магнитного поля, изменяющуюся в зависимости от того,
какая часть колеса находится напротив датчика: впадина или зубец. В этом модуле
очень важно правильно расположить датчик и магнит: угол между осями
симметрии датчика и колеса должен быть близок к нулю. Более
того, желательно, чтобы они совпадали. На рис. 7.22Б отображена принципиальная
схема такого модуля. Сигналы с мостовой схемы поступают сначала на
соответствующие усилители, а потом через фильтры нижних частот на триггеры
Шмитта, формирующие на своих выходах прямоугольные импульсы. Разность фаз на
обоих выходах (рис. 7.23А и 7.23Б) показывает направление вращения.
Рис. 7.22. А — оптимальное рабочее положение
магниторезистивного модуля. Отметим, что магнит находится за датчиком, Б — принципиальная
схема модуля
Модуль работает также как и магнитный мост Уитстона,
измеряющий напряженность магнитного поля, изменяющуюся в зависимости от того,
какая часть колеса находится напротив датчика: впадина или зубец. В этом модуле
очень важно правильно расположить датчик и магнит: угол между осями
симметрии датчика и колеса должен быть близок к нулю. Более
того, желательно, чтобы они совпадали. На рис. 7.22Б отображена принципиальная
схема такого модуля. Сигналы с мостовой схемы поступают сначала на
соответствующие усилители, а потом через фильтры нижних частот на триггеры
Шмитта, формирующие на своих выходах прямоугольные импульсы. Разность фаз на
обоих выходах (рис. 7.23А и 7.23Б) показывает направление вращения.
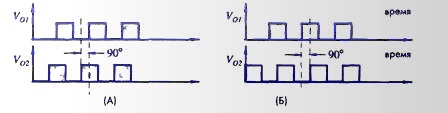 Рис. 7.23. Выходные сигналы магниторезистивного модуля: А — колесо
вращается в направлении 1, Б — в направлении 2
Рис. 7.23. Выходные сигналы магниторезистивного модуля: А — колесо
вращается в направлении 1, Б — в направлении 2
Магнитострикционный детектор Для измерения больших перемещений с высоким разрешением часто применяются магнитострикционные ультразвуковые датчики [8]. Магнитострикционный преобразователь состоит из двух основных частей: длинного волновода (до 7 м) и постоянного кольцевого магнита (рис. 7.24). Магнит может свободно перемещаться вдоль волновода, не касаясь его. Положение магнита над той или иной точкой волновода и является измеряемым сигналом, который датчик преобразует в электрический сигнал. Внутри волновода проходит проводник, который при подаче на него электрических импульсов создает магнитное поле вдоль всей его длины. Такие преобразователи выпускаются несколькими производителями, к примеру, Space Age Control, Inc. Магниторезистивные датчики Эти датчики применяются в тех же самых областях, что и датчики Холла. Магниторезистивные датчики могут использоваться как детекторы приближения, положения и поворота. Для функционирования им необходимы внешние источники магнитных полей, в качестве которых обычно применяются прикрепленные к ним постоянные магниты. На рис. 7.19 отображена схема простого датчика линейных перемещений. Здесь для получения корректных результатов необходимо учи— 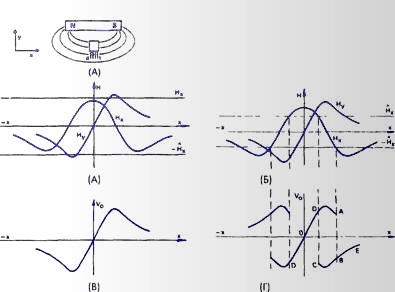 Рис. 7.19. Зависимость выходного сигнала
магниторезис-тивного датчика, помещенного в поле постоянного магнита, от
перемещения х, совершаемого параллельно оси магнита (А — В). Магнит создает как
продольное, так и поперечное поле. Изменение положения датчика относительно
магнита приводит к изменению его выходных характеристик. (Г и Д) Выходной
сигнал датчика при слишком сильном магнитном поле
тывать ряд факторов, описанных далее. Датчик, размещенный
рядом с постоянным магнитом, подвергается воздействию магнитного поля как в
горизонтальном, так и вертикальном направлениях. Если магнит ориентирован
параллельно датчику (т.е. в направлении х), как отображено на рис. 7.19А, Нх
характеризует продольное поле, а изменение Н является мерой перемещения х. На
рис. 7.19Б отображены графики изменения Н иН в зависимости отх, а на рис. 7.19В
представлен соответствующий выходной сигнал. В этом примере напряженность поля
вдоль оси х никогда не превышает ± Н (значение напряженности, заставляющее
датчик переключаться), при этом характеристики датчика остаются стабильными во
всем диапазоне измерений. Однако, если магнит слишком мощный или расстояние
между датчиком и магнитом очень маленькое, выходной сигнал будет значительно
отличаться от отображенного на рисунке.
Предположим, что первоначально датчик находится на
поперечной оси магнита (х = 0). При этом Н =0, a Hv равна максимальному
значению (> Н). Теперь датчик перемещается в направлении +х, тогда его
выходной сигнал изменяется, как отображено на рис. 7.19Д. При смещении датчика в
сторону увеличения координаты х, Н и V0 возрастут, а Нх сначала упадет до нуля,
а потом начнет расти в отрицательную сторону до тех пор, пока Н не превысит
значение -Н. В этой точке характеристики датчика резко меняются, и выходное
напряжение изменяет свою полярность — участок АВ на рис. 7.19Д. При дальнейшем
продвижении датчика вдоль оси х выходное напряжение датчика будет меняться в
соответствии с участком BE. Если теперь датчик начнет двигаться в
противоположном направлении, Н будет расти до тех пор, пока не превысит
значение +Й, напряжение VQ будет меняться в соответствии с участком ВС. В этой
точке характеристики датчика опять резко меняются, а выходной сигнал
перескакивает из точки С в точку D. Очевидно, что у датчика существует
гистерезисная петля ABCD. Аналогичная петля возникает при движении датчика в
направлении — х. На рис. 7.19Д отображен идеализированный случай, поскольку
переключения никогда не происходят так резко.
На рис. 7.20А отображено, как можно использовать
магниторезистивные датчики KMZ10B и КМ110В (информация по этим датчикам взята
из документации Philips Semiconductors BV (Eindhoven, The Netherlands)) для
определения линейных перемещений металлических объектов.
Рис. 7.19. Зависимость выходного сигнала
магниторезис-тивного датчика, помещенного в поле постоянного магнита, от
перемещения х, совершаемого параллельно оси магнита (А — В). Магнит создает как
продольное, так и поперечное поле. Изменение положения датчика относительно
магнита приводит к изменению его выходных характеристик. (Г и Д) Выходной
сигнал датчика при слишком сильном магнитном поле
тывать ряд факторов, описанных далее. Датчик, размещенный
рядом с постоянным магнитом, подвергается воздействию магнитного поля как в
горизонтальном, так и вертикальном направлениях. Если магнит ориентирован
параллельно датчику (т.е. в направлении х), как отображено на рис. 7.19А, Нх
характеризует продольное поле, а изменение Н является мерой перемещения х. На
рис. 7.19Б отображены графики изменения Н иН в зависимости отх, а на рис. 7.19В
представлен соответствующий выходной сигнал. В этом примере напряженность поля
вдоль оси х никогда не превышает ± Н (значение напряженности, заставляющее
датчик переключаться), при этом характеристики датчика остаются стабильными во
всем диапазоне измерений. Однако, если магнит слишком мощный или расстояние
между датчиком и магнитом очень маленькое, выходной сигнал будет значительно
отличаться от отображенного на рисунке.
Предположим, что первоначально датчик находится на
поперечной оси магнита (х = 0). При этом Н =0, a Hv равна максимальному
значению (> Н). Теперь датчик перемещается в направлении +х, тогда его
выходной сигнал изменяется, как отображено на рис. 7.19Д. При смещении датчика в
сторону увеличения координаты х, Н и V0 возрастут, а Нх сначала упадет до нуля,
а потом начнет расти в отрицательную сторону до тех пор, пока Н не превысит
значение -Н. В этой точке характеристики датчика резко меняются, и выходное
напряжение изменяет свою полярность — участок АВ на рис. 7.19Д. При дальнейшем
продвижении датчика вдоль оси х выходное напряжение датчика будет меняться в
соответствии с участком BE. Если теперь датчик начнет двигаться в
противоположном направлении, Н будет расти до тех пор, пока не превысит
значение +Й, напряжение VQ будет меняться в соответствии с участком ВС. В этой
точке характеристики датчика опять резко меняются, а выходной сигнал
перескакивает из точки С в точку D. Очевидно, что у датчика существует
гистерезисная петля ABCD. Аналогичная петля возникает при движении датчика в
направлении — х. На рис. 7.19Д отображен идеализированный случай, поскольку
переключения никогда не происходят так резко.
На рис. 7.20А отображено, как можно использовать
магниторезистивные датчики KMZ10B и КМ110В (информация по этим датчикам взята
из документации Philips Semiconductors BV (Eindhoven, The Netherlands)) для
определения линейных перемещений металлических объектов.
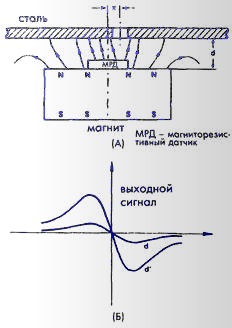 Рис. 7.20. Измерение линейных перемещений при помощи
магниторезистивного датчика KMZ10: А — датчик расположен между постоянным
магнитом и металлической пластиной, Б — выходной сигнал при разном расстоянии
между магнитом и пластиной.
Рис. 7.20. Измерение линейных перемещений при помощи
магниторезистивного датчика KMZ10: А — датчик расположен между постоянным
магнитом и металлической пластиной, Б — выходной сигнал при разном расстоянии
между магнитом и пластиной.
 Датчик размещается между пластиной и постоянным магнитом,
ось того ориентирована перпендикулярно оси металлической пластины. Другое магнитное поле, образованное постоянным магнитом, существует только
вблизи него. Поэтому два поля складываются только там, где находится постоянный
магнит. Результирующее поле находится
Рис. 7.24. Магнитострикционный датчик, использующий
ультразвуковые волны для определения положения постоянного магнита
Датчик размещается между пластиной и постоянным магнитом,
ось того ориентирована перпендикулярно оси металлической пластины. Другое магнитное поле, образованное постоянным магнитом, существует только
вблизи него. Поэтому два поля складываются только там, где находится постоянный
магнит. Результирующее поле находится
Рис. 7.24. Магнитострикционный датчик, использующий
ультразвуковые волны для определения положения постоянного магнита
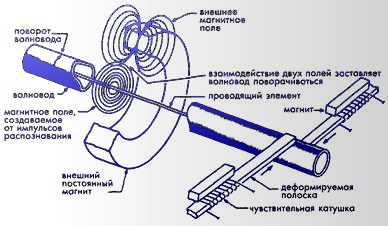 в виде векторной суммы напряженностей двух полей. Это поле
создает крутящий момент, заставляющий волновод поворачиваться в месте
расположения магнита. Это явление известно под названием эффекта Вайдемана.
Таким образом, электрические импульсы, подаваемые в
коаксиальный проводник волновода, приводят к появлению механических импульсов
кручения, распространяющихся вдоль волновода со скоростью звука,
соответствующей его материалу. Момент прихода импульсов на головку датчика
необходимо точно определять. Один из способов детектирования импульсов
заключается в преобразовании ультразвуковых импульсов в выходные электрические
сигналы. Это можно выполнить при помощи пьезоэлектрических сенсоров или, как
отображено на рис. 7.24, при помощи датчика магнитного сопротивления, который
состоит из двух катушек, расположенных рядом с некрупными постоянными
магнитами. Катушки механически связаны с волноводом, поэтому и реагируют на
импульсы, возникающие в нем, в такт с которыми они вырабатывают короткие
электрические импульсы. Временная задержка между этими импульсами и
соответствующими импульсами возбуждения, подаваемыми на проводник волновода,
является точной мерой положения кольцевого магнита. Эта временная задержка при
помощи соответствующей электронной схемы преобразуется в цифровой код. Достоинства такого датчика: линейность (порядка 0.05% от полной шкалы
измерений), хорошая воспроизводимость (порядка 3 мкм) и долговременная
стабильность. Этот датчик может работать в агрессивных средах, при высоких
давлениях и температурах, а также при сильной радиации. У магнитострикцион-ного
датчика есть еще одно достоинство: низкая температурная чувствительность,
которая может составлять порядка 20х10_6 на °С.
Такие датчики используются в гидравлических цилиндрах, в
прессовальных машинах (для измерения линейных перемещений пресса), в горном
деле (для обнаружения подвижки скал), вращающихся мельницах, кузницах, лифтах и
в других устройствах, где требуется высокая разрешающая способность при
измерении больших перемещений.
в виде векторной суммы напряженностей двух полей. Это поле
создает крутящий момент, заставляющий волновод поворачиваться в месте
расположения магнита. Это явление известно под названием эффекта Вайдемана.
Таким образом, электрические импульсы, подаваемые в
коаксиальный проводник волновода, приводят к появлению механических импульсов
кручения, распространяющихся вдоль волновода со скоростью звука,
соответствующей его материалу. Момент прихода импульсов на головку датчика
необходимо точно определять. Один из способов детектирования импульсов
заключается в преобразовании ультразвуковых импульсов в выходные электрические
сигналы. Это можно выполнить при помощи пьезоэлектрических сенсоров или, как
отображено на рис. 7.24, при помощи датчика магнитного сопротивления, который
состоит из двух катушек, расположенных рядом с некрупными постоянными
магнитами. Катушки механически связаны с волноводом, поэтому и реагируют на
импульсы, возникающие в нем, в такт с которыми они вырабатывают короткие
электрические импульсы. Временная задержка между этими импульсами и
соответствующими импульсами возбуждения, подаваемыми на проводник волновода,
является точной мерой положения кольцевого магнита. Эта временная задержка при
помощи соответствующей электронной схемы преобразуется в цифровой код. Достоинства такого датчика: линейность (порядка 0.05% от полной шкалы
измерений), хорошая воспроизводимость (порядка 3 мкм) и долговременная
стабильность. Этот датчик может работать в агрессивных средах, при высоких
давлениях и температурах, а также при сильной радиации. У магнитострикцион-ного
датчика есть еще одно достоинство: низкая температурная чувствительность,
которая может составлять порядка 20х10_6 на °С.
Такие датчики используются в гидравлических цилиндрах, в
прессовальных машинах (для измерения линейных перемещений пресса), в горном
деле (для обнаружения подвижки скал), вращающихся мельницах, кузницах, лифтах и
в других устройствах, где требуется высокая разрешающая способность при
измерении больших перемещений.
.
Информация исключительно в ознакомительных целях. При использовании материалов этого сайта ссылка обязательна.Правообладатели статей являются их правообладателями. |
По вопросам размещения статей пишите на email:
|
