|
|
|
ДАТЧИКИ ТЕМПЕРАТУРЫЛюбой датчик, независимо от его размеров, вносит возмущение в зону измерения, что приводит к возникновению ошибок при определении температуры. Это касается любых способов детектирования: и радиационных, и конвективных и теплопроводных. . Измерение температуры всегда заключается в передаче небольшой порции тепловой энергии от объекта к датчику, который должен преобразовать эту энергию в электрический сигнал. Когда контактный детектор (зонд) помещается внутрь объекта или на него, между объектом и зондом происходит передача тепла за счет теплопроводности. При этом чувствительный элемент, входящий в состав зонда, либо разогревается, либо охлаждается.В доисторические времена тепло было для людей основой их жизни, поэтому даже тогда они пытались оценить его интенсивность, измеряя температуру. Возможно самым простым и самым распространенным способом определения температуры является измерение теплового расширения различных веществ. На этом принципе реализованы все жидкостные стеклянные термометры. В электрических преобразователях применяются несколько другие принципы детектирования. В настоящее время широко распространенны следующие датчики температуры: рези-стивные, термоэлектрические, полупроводниковые, оптические и пьезоэлектрические детекторы. То же самое происходит и при передаче тепла при помощи излучения: тепловая энергия в виде ИК излучения либо поглощается датчиком, либо выделяется им в зависимости от температуры объекта и типа оптической связи. Таким образом, разработчик должен всегда стремиться минимизировать погрешность измерений, применяя соответствующие конструкции сенсоров и методы компенсации погрешностей. Существует два основных метода измерения температуры: равновесный и прогнозируемый. В равновесном методе измерение температуры проводится, когда между измеряемой поверхностью и чувствительным элементом, находящимся в зонде, наступает тепловое равновесие, т.е. между датчиком и объектом измерения нет существенной разности температур. В методе прогнозирования в процессе проведения измерений тепловое равновесие не наступает, а значение текущей температуры определяется по скорости изменения температуры датчика. С момента размещения чувственного элемента на объекте до наступления теплового равновесия между объектом и датчиком может пройти довольно много времени, особенно, если контактные площадки сухие. к примеру, медицинский электронный термометр определяет температуру в ванне с водой за 10 секунд, в то время как для измерения подмышечной температуры требуется, по крайней мере, 3...5 минут. Рассмотрим источники возможных ошибок при измерении температуры контактным способом. Одна из причин возникновения ошибок заключается в том, что датчик, как правило, соединяется не только с объектом, температуру того он измеряет, но и с другими предметами. Другая причина кроется в использовании соединительных кабелей (рис. 16.1А). Чувствительный элемент, подсоединяемый к объекту с температурой Тв, обладает своей собственной температурой Ts. Для проведения точных измерений необходимо достичь состояния теплового равновесия, при котором эти две температуры станут практически равными. Один конец кабеля соединяется с зондом, а другой конец подвергается действию температуры окружающей среды Т, которая может значительно отличаться от температуры объекта. Таким образом, соединительный кабель не только передает электрический сигнал датчика, но и часть тепла от элемента или к нему. На рис. 16.2Б отображена тепловая схема, включающая в себя объект, датчик, окружающую среду и тепловые сопротивления г, и г2, которые отображают способность вещества проводить тепловую энергию и определяются как величины, обратные коэффициентам теплопроводности, т.е. г=1/а. Если объект теплее окружающей среды, тепловой поток будет направлен туда, куда указывает стрелка. 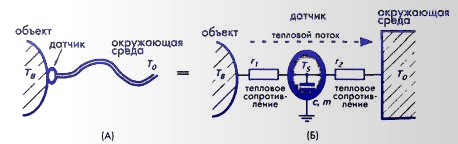 Рис. 16.1. Датчик температуры имеет тепловые контакты как с
объектом, так и с соединительным кабелем (А), эквивалентная тепловая схема (Б)
Схема на рис. 16.1Б напоминает электрическую схему, и для
расчета ее параметров также применяются законы электрических цепей, такие как
законы Кирхгофа и Ома (Интересно отметить, что закон Кирхгофа был первоначально
выведен не для электрической цепи, а для водопровода). Теплоемкость вещества,
по аналогии с электрическими цепями, отображается в виде конденсатора. Считая,
что все температуры уже вышли на определенный стационарный уровень, к этой
системе можно применить закон сохранения энергии, из того рекомендуется, что
тепловая энергия, переданная объектом датчику, должна быть равна энергии,
отданной датчиком в окружающую среду. Исходя из этого, можно
записать следующее уравнение:
где AT — разность температур между объектом и окружающей
средой. Подробнее рассмотрим уравнение (16.2). Анализируя его, можно сделать
несколько заключений. Во-первых, температура датчика всегда отличается от
температуры объекта. Исключение составляет случай, когда температуры окружающей
среды и объекта равны (т.е. AT=TB — TQ=Q). Во-вторых, при любом ДГтемпература
датчика будет приближаться к температуре объекта только в том случае, когда
отношение rjr2 стремится к нулю. Это означает, что для снижения погрешности
измерения необходимо улучшать тепловую связь между объектом и датчиком и, по
возможности, отделять датчик от окружающей среды, что часто очень нелегко
выполнить.
Все вышесказанное справедливо для стационарных условий. Теперь рассмотрим динамический процесс, когда температура меняется во времени. к примеру, в момент времени t=5r, температура датчика будет составлять 0.7% от
ДГ0, а при *=10т, разница между температурами уже равна 0.005%.
Теперь рассмотрим ситуацию, при той датчик теряет часть
тепла в окружающую среду, т.е. г2±°°. В этом случае тепловая постоянная времени
определяется как:
Рис. 16.1. Датчик температуры имеет тепловые контакты как с
объектом, так и с соединительным кабелем (А), эквивалентная тепловая схема (Б)
Схема на рис. 16.1Б напоминает электрическую схему, и для
расчета ее параметров также применяются законы электрических цепей, такие как
законы Кирхгофа и Ома (Интересно отметить, что закон Кирхгофа был первоначально
выведен не для электрической цепи, а для водопровода). Теплоемкость вещества,
по аналогии с электрическими цепями, отображается в виде конденсатора. Считая,
что все температуры уже вышли на определенный стационарный уровень, к этой
системе можно применить закон сохранения энергии, из того рекомендуется, что
тепловая энергия, переданная объектом датчику, должна быть равна энергии,
отданной датчиком в окружающую среду. Исходя из этого, можно
записать следующее уравнение:
где AT — разность температур между объектом и окружающей
средой. Подробнее рассмотрим уравнение (16.2). Анализируя его, можно сделать
несколько заключений. Во-первых, температура датчика всегда отличается от
температуры объекта. Исключение составляет случай, когда температуры окружающей
среды и объекта равны (т.е. AT=TB — TQ=Q). Во-вторых, при любом ДГтемпература
датчика будет приближаться к температуре объекта только в том случае, когда
отношение rjr2 стремится к нулю. Это означает, что для снижения погрешности
измерения необходимо улучшать тепловую связь между объектом и датчиком и, по
возможности, отделять датчик от окружающей среды, что часто очень нелегко
выполнить.
Все вышесказанное справедливо для стационарных условий. Теперь рассмотрим динамический процесс, когда температура меняется во времени. к примеру, в момент времени t=5r, температура датчика будет составлять 0.7% от
ДГ0, а при *=10т, разница между температурами уже равна 0.005%.
Теперь рассмотрим ситуацию, при той датчик теряет часть
тепла в окружающую среду, т.е. г2±°°. В этом случае тепловая постоянная времени
определяется как:
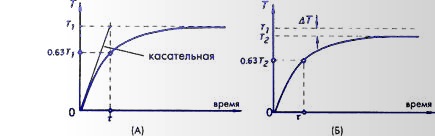 Рис. 16.2. Переходные характеристики чувственного
элемента: А — идеальная связь датчика с объектом (нет тепловых потерь), Б — чувствительный
элемент отдает часть своего тепла в окружающую среду
Из уравнения (16.8) рекомендуется, что при ?-><*>,
температура датчика становиться равной температуре объекта: Т=ТГ Теоретически,
для достижения полного теплового равновесия между объектом и датчиком требуется
бесконечно большое время. Но поскольку обычно требуется проводить измерения с
заданной точностью, в большинстве случаев считают, что через интервал времени,
равный 5...10 постоянным времени, наступает квазиравновесное состояние. Относительные датчики измеряют разность температур двух объектов, один из
которых называется эталонным. Типичным представителем относительных сенсоров
является термопара.
Рис. 16.2. Переходные характеристики чувственного
элемента: А — идеальная связь датчика с объектом (нет тепловых потерь), Б — чувствительный
элемент отдает часть своего тепла в окружающую среду
Из уравнения (16.8) рекомендуется, что при ?-><*>,
температура датчика становиться равной температуре объекта: Т=ТГ Теоретически,
для достижения полного теплового равновесия между объектом и датчиком требуется
бесконечно большое время. Но поскольку обычно требуется проводить измерения с
заданной точностью, в большинстве случаев считают, что через интервал времени,
равный 5...10 постоянным времени, наступает квазиравновесное состояние. Относительные датчики измеряют разность температур двух объектов, один из
которых называется эталонным. Типичным представителем относительных сенсоров
является термопара.
.
Информация исключительно в ознакомительных целях. При использовании материалов этого сайта ссылка обязательна.Правообладатели статей являются их правообладателями. |
По вопросам размещения статей пишите на email:
|
