|
|
|
ЕМКОСТНЫЕ ДАТЧИКИ ПРИСУТСТВИЯВторой пластиной этого конденсатора может быть либо корпус автомобиля, либо отдельная пластина, расположенная под ковриком на полу. В качестве эталонного конденсатора Сх используется либо постоянный, либо переменный конденсатор. Его необходимо размещать недалеко от сидения. Эталонный и чувствительный конденсаторы подключаются к соответствующим входам детектора зарядов (через резисторы У?! и R2). Для уменьшения паразитных наводок соединительные провода рекомендуется скручивать. Дифференциальный детектор зарядов управляется генератором прямоугольных импульсов (рис. 6.5). Когда на сидении никто не сидит, эталонный конденсатор устанавливается приблизительно равным конденсатору С Резисторы и соответствующие конденсаторы определяют постоянные времени двух цепей В исходном состоянии обе ЛСцепи имеют одинаковые постоянные времени, равные т, Напряжения с резисторов подаются на входы ОУ, выходной сигнал того Vc практически равен нулю Небольшие пики на выходном сигнале свидетельствуют о некотором разбалансе схемы Когда человек садится на сидение, его тело формирует дополнительную емкость параллельно С, что приводит к увеличению постоянной времени цепи от т, до т2 Это сказывается на увеличении амплитуды пиков на выходе ОУ Компаратор сравнивает V с эталонным уровнем напряжения V Когда К становится больше V. компаратор посылает сигнал на логическое устройство, вырабатывающее сигнал тревоги V, свидетельствующий о том, что в машине кто-то находится рекомендуется отметить, что емкостной детектор является активным устройством, поскольку для его работы необходим сигнал генератора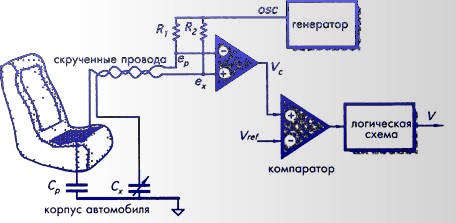 Рис. 6.4. Емкостной детектор для охраны автомобиля охранного
детектора
Рис. 6.4. Емкостной детектор для охраны автомобиля охранного
детектора
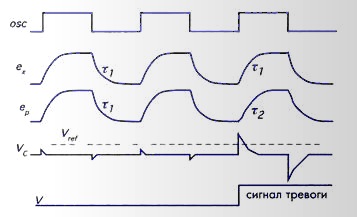 Рис. 6.5. Временные диаграммы работы емкостного датчика
Рис. 6.5. Временные диаграммы работы емкостного датчика
Когда емкостной датчик присутствия используется рядом или на металлических устройствах, его чувствительность может быть несколько снижена из-за паразитных емкостных связей между электродом и металлическими частями. 6.6А отображен робот с металлической рукой. Рука движется рядом с людьми и другими потенциально проводящими объектами и может с ними столкнуться, если управляющий компьютер робота не получит информацию о близости руки с препятствием. При приближении любого объекта круке робота формируется емкостная связь между ним и рукой, равная СЛ. Рука робота покрыта электрически изолированной проводящей оболочкой, называемой электродом. На рис. 6.3 отображено, как можно при помощи детектирования емкостной связи определять присутствие людей в окрестности датчика. Однако массивная металлическая рука робота (рис. 6.6Б) имеет гораздо более сильную емкостную связь с электродом, чем образуемая связь между элекгродом и объектом. Элегантное решение этой проблемы — размещение между электродом и рукой робота промежуточного экрана (рис. 6.6В) (Этот принцип был предложен М.С. Катоу из Palnning Research Corp. Поскольку человеческое тело представляет собой среду с высокой диэлектрической проницаемостью (на частоте 40 МГц диэлектрическая константа мышц, кожи и крови приблизительно равна 97, а жира и костей — 15), между ним и окружающими предметами возникают различные емкостные связи. Величины появляющихся переходных емкостей определяются такими факторами, как размер тела, материал одежды , тип окружающих объектов, погода и т.д. Обычно он лежит в диапазоне от нескольких пикофарад до нескольких нанофарад. При движении человека величины этих емкостей меняются, что дает возможность отделить движущиеся объекты от статических. На самом деле все объекты связаны друг с другом некоторыми емкостными связями. И если эти связи в какой-либо зоне зафиксировать, появление любого нового объекта в окрестности этой зоны приведет к нарушению установившихся связей. На рис. 6.3 отображено, что первоначально емкость между тестовой пластиной и землей (здесь, под словом «земля» подразумевается любой большой объект, такой как земля, озеро, автомобиль, корабль, самолет и т.д.) равна С,. При вторжении человека в окрестность этой пластины формируются два дополнительных конденсатора: Са — между пластиной и телом и Сь — между телом и землей. Поэтому суммарная емкость между пластиной и землей увеличится на величину АС: 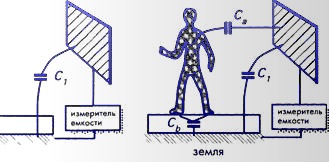 Рис. 6.3. Человек вносит дополнительную емкость в схему
детектора
Рис. 6.3. Человек вносит дополнительную емкость в схему
детектора
На рис. 6.4 отображена емкостная охранная система для автомобиля [3]. Чувствительный элемент вмонтирован в сидение автомобиля. Он может быть изготовлен в виде металлической пластины или сетки, электропроводной ткани и т.д. Чувствительный элемент формирует одну из пластин конденсатора С. Эффективный способ борьбы с паразитными емкостями — применение экранов. На рис. при создании робота для NASA's Jet Propulsion Laboratory). Роль датчика приближения здесь выполняет многослойное покрытие руки робота, в котором нижний слой является диэлектриком, после него идет большой токопроводящий экран, а верхний слой представляет собой узкую пластину электрода. Для уменьшения емкостной связи между электродом и рукой робота, потенциал экрана должен быть равен потенциалу электрода, следовательно, на экран надо подавать напряжение, равное напряжению электрода (поэтому такой экран часто называется управляемым экраном). При выполнении этого условия между экраном и электродом не будет никакого электрического поля, а между экраном и рукой робота возникнет сильное электрическое поле. При этом между электродом и объектом также формируется достаточно сильное электрическое поле. На рис. 6.7 отображена упрощенная схема генератора прямоугольных импульсов, частота которых зависит от значений входной емкости, состоящей из следующих емкостей: С (между датчиком и землей), Сй(между датчиком и объектом) и С0 (между объектом и землей). Электрод соединен с экраном через повторитель напряжения. Частотно-модулированный сигнал поступает в компьютер робота, управляющий движением его руки. Такое устройство позволяет детектировать соседние проводящие объекты на расстоянии 30 см. 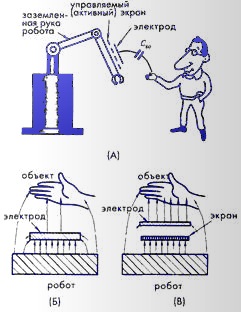 Рис. 6.6. Емкостной датчик приближения. Управляемый экран
располагается на металлической руке заземленного робота (А). Без экрана
электрическое поле в основном сосредоточено между электродом и роботом (Б),
тогда как экран помогает перенаправить поле в область между электродом и
объектом (В)
Рис. 6.6. Емкостной датчик приближения. Управляемый экран
располагается на металлической руке заземленного робота (А). Без экрана
электрическое поле в основном сосредоточено между электродом и роботом (Б),
тогда как экран помогает перенаправить поле в область между электродом и
объектом (В)
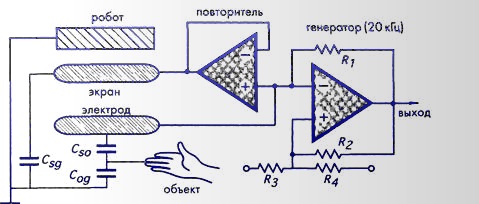 Рис. 6.7. Упрощенная схема частотного модулятора,
управляемого входными емкостями
Рис. 6.7. Упрощенная схема частотного модулятора,
управляемого входными емкостями
.
Информация исключительно в ознакомительных целях. При использовании материалов этого сайта ссылка обязательна.Правообладатели статей являются их правообладателями. |
По вопросам размещения статей пишите на email:
|
