|
|
|
ДИНАМИЧЕСКИЕ МОДЕЛИ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВДля определения динамических характеристик сенсоров на их вход необходимо подавать переменные внешние сигналы и следить за реакцией на выходе. В общем виде, тестовые внешние сигналы могут быть любой формы, определяемой только практическими потребностями. к примеру, для определения собственной частоты акселерометра, лучшими тестовыми сигналами являются синусоидальные колебания переменной частоты, а для термисторного щупа тестовый сигнал должен представлять собой ступенчатую функцию температуры. Для других случаев чаще всего применяются ступенчатая или импульсная функции. Ступенчатые функции обладают теоретически бесконечным частотным спектром, что является причиной их использования для определения динамических характеристик сенсоров, поскольку позволяют проводить тестирование одновременно на всех частотах. Математически поведение датчика может быть описано дифференциальным уравнением, порядок того зависит от физической природы чувственного элемента и конструкции всей системы. Существует несколько типов зависимостей между входным сигналом s и выходной реакцией S: нулевого порядка, первого порядка и второго порядка. Дифференциальные уравнения соответствуют датчикам или системам, в состав которых входят по два энергонакопительных элемента — к примеру, катушка индуктивности и конденсатор или датчик температуры и конденсатор. Поэтому сила или крутящий момент, формируемые штоком или пружиной, как правило, также пропорциональны перемещению. В таблице 3.4 приведены основные уравнения для некоторых механических элементов. Таблица 3.4. Механические, тепловые и электрические аналогии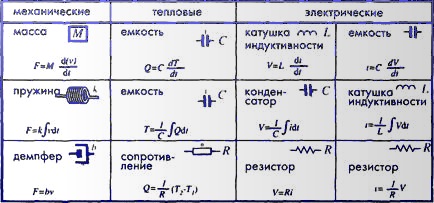
 Самый простой способ вывода уравнений движения — выделение
каждого инерционного элемента (массы) и рассмотрение его как свободного тела. Поскольку в состав сенсоров второго порядка часто входят элементы, совершающие
колебательные движения, это может приводить к неустойчивости всей системы. На
рис. 2.1 IE во второй главе отображена типичная форма выходного сигнала
устройства второго порядка в ответ на ступенчатую входную функцию. Динамическая
ошибка в таких системах определяется несколькими факторами: частотой со0 и
коэффициентом затухания Ь, связанных с независимыми коэффициентами уравнения
(3.151) следующими соотношениями:
Критическое демпфирование системы соответствует коэффициенту
затухания b = 1. При b > 1 наступает передемпфирование, а при b < 1 — недодемпфирование. При этом предполагается, что все свободные компоненты начинают свое движение из
положения равновесия, а удерживающие силы или моменты, возникающие при
перемещении, возвращают их снова на исходную позицию. При выполнении этих
условий к каждому элементу можно применить второй закон Ньютона и вывести из
него уравнение движения.
Для прямолинейного движения и совместимых систем единиц
измерения второй закон Ньютона формулируется следующим образом: сумма сил,
действующих на тело, равна произведению его массы наускорение. В системе СИ
сила измеряется в ньютонах (Н), масса в килограммах (кг), а ускорение в м/с2.
Для вращательного движения закон Ньютона гласит, что сумма
моментов сил, действующих на тело, равна произведению его момента инерции на
угловое ускорение. Момент сил измеряется в Ньютонометр, момент инерции в
килограммах на метр квадратный (кг-м2), а угловое ускорение — в радианах на
секунду в квадрате (рад/с2).
Рассмотрим одноосевой акселерометр, состоящий из
инерционного элемента, чье движение преобразуется в электрический сигнал. Для
этого, к примеру, можно применить пьезоэлектрический преобразователь. На рис. Для получения более подробной информации о динамических характеристиках надо
обратиться к специализированной литературе, к примеру.
Математическое моделирование датчика является мощным
инструментом для прогнозирования его характеристик. Моделирование бывает двух
типов: статическое и динамическое. Статические модели обычно используют
передаточную функцию датчика в том виде, как она представлена во второй главе. В этой главе дано краткое описание способов оценки динамических характеристик
системы. В состав динамических моделей могут входить несколько независимых
переменных, одной из которых всегда является время. Рассматриваемые модели
соответствуют представлению сенсоров в виде систем с сосредоточенными
параметрами. В этом сайте все математические модели строятся на применении
законов физики к отдельным элементам системы. Другими словами, при разработке
модели датчик разбивается на отдельные элементы, и каждый элемент
рассматривается отдельно. После этого математические описания индивидуальных
элементов объединяются в единую модель, описывающую поведение всей системы в
целом.
Самый простой способ вывода уравнений движения — выделение
каждого инерционного элемента (массы) и рассмотрение его как свободного тела. Поскольку в состав сенсоров второго порядка часто входят элементы, совершающие
колебательные движения, это может приводить к неустойчивости всей системы. На
рис. 2.1 IE во второй главе отображена типичная форма выходного сигнала
устройства второго порядка в ответ на ступенчатую входную функцию. Динамическая
ошибка в таких системах определяется несколькими факторами: частотой со0 и
коэффициентом затухания Ь, связанных с независимыми коэффициентами уравнения
(3.151) следующими соотношениями:
Критическое демпфирование системы соответствует коэффициенту
затухания b = 1. При b > 1 наступает передемпфирование, а при b < 1 — недодемпфирование. При этом предполагается, что все свободные компоненты начинают свое движение из
положения равновесия, а удерживающие силы или моменты, возникающие при
перемещении, возвращают их снова на исходную позицию. При выполнении этих
условий к каждому элементу можно применить второй закон Ньютона и вывести из
него уравнение движения.
Для прямолинейного движения и совместимых систем единиц
измерения второй закон Ньютона формулируется следующим образом: сумма сил,
действующих на тело, равна произведению его массы наускорение. В системе СИ
сила измеряется в ньютонах (Н), масса в килограммах (кг), а ускорение в м/с2.
Для вращательного движения закон Ньютона гласит, что сумма
моментов сил, действующих на тело, равна произведению его момента инерции на
угловое ускорение. Момент сил измеряется в Ньютонометр, момент инерции в
килограммах на метр квадратный (кг-м2), а угловое ускорение — в радианах на
секунду в квадрате (рад/с2).
Рассмотрим одноосевой акселерометр, состоящий из
инерционного элемента, чье движение преобразуется в электрический сигнал. Для
этого, к примеру, можно применить пьезоэлектрический преобразователь. На рис. Для получения более подробной информации о динамических характеристиках надо
обратиться к специализированной литературе, к примеру.
Математическое моделирование датчика является мощным
инструментом для прогнозирования его характеристик. Моделирование бывает двух
типов: статическое и динамическое. Статические модели обычно используют
передаточную функцию датчика в том виде, как она представлена во второй главе. В этой главе дано краткое описание способов оценки динамических характеристик
системы. В состав динамических моделей могут входить несколько независимых
переменных, одной из которых всегда является время. Рассматриваемые модели
соответствуют представлению сенсоров в виде систем с сосредоточенными
параметрами. В этом сайте все математические модели строятся на применении
законов физики к отдельным элементам системы. Другими словами, при разработке
модели датчик разбивается на отдельные элементы, и каждый элемент
рассматривается отдельно. После этого математические описания индивидуальных
элементов объединяются в единую модель, описывающую поведение всей системы в
целом.
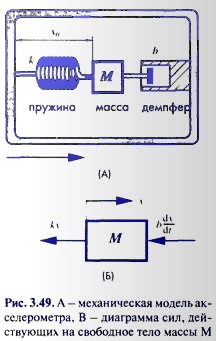
Механические элементы Динамический механический элемент можно представить в виде массы (инерционного компонента), соединенной с пружиной и демпфирующим устройством. При вязкостном демпфировании и прямолинейном перемещении удерживающая сила пропорциональна скорости движения. Аналогично этому и при круговом движении удерживающая сила всегда пропорциональна угловой скорости. 3.49А отображена механическая модель такого акселерометра. Масса М удерживается пружиной, обладающей коэффициентом жесткости к. Движение массы демпфируется успокоительным устройством, обеспечивающим коэффициент затухания Ь. Инерционный элемент может перемещаться в корпусе акселерометра только в горизонтальном направлении. Во время движения на устройство действует ускорение tfx/dt2, а выходной сигнал пропорционален отклонению массы на расстояние х0. Поскольку инерционный элемент может перемещаться только в одном направлении, акселерометр имеет только одну степень свободы. На рис. 3.49Б отображена диаграмма сил, действующих на свободное тело массы М. Отметим, что х0 равно сумме смещения тела от равновесного состояния х и нетого фиксированного расстояния. Применяя второй закон Ньютона, получаем соотношение. Получим требуемое уравнение движения: Отметим, что каждый член в уравнении (3.156) имеет размерность ньютон (Н). Это выражение является дифференциальным уравнением второго порядка, что означает, что на выходе акселерометра могут появиться нежелательные колебания. На практике, регулируя коэффициент затухания Ь, добиваются состояния критического демпфирования. Тепловые элементы Тепловые элементы — это радиаторы, нагревательные элементы, теплоизолято-ры, отражатели и поглотители тепла. При изучении тепловых характеристик датчик рассматривается как составная часть измерительной системы, при этом учитываются: теплопередача через корпус устройства и монтажные элементы, конвекция воздуха, обмен тепловыми излучениями с остальными объектами и т.д. 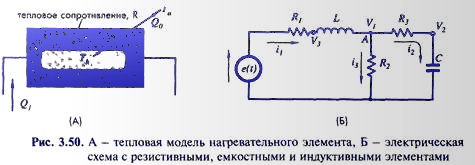 Вспомним, что тепло передается тремя способами: через
теплопроводность, естественную и принудительную конвекцию и тепловое излучение
(раздел 3.12). При построении простой модели с сосредоточенными параметрами для
определения изменения температуры объекта можно воспользоваться первым законом
термодинамики, по которому скорость изменения внутренней энергии тела равна
разности втекающего и вытекающего потоков тепла, что очень напоминает задачу об
уровне воды в резервуаре, когда в одну трубу вода заливается, а из другой
сливается. Тогда тепловой баланс можно выразить в виде уравнения:
Вспомним, что тепло передается тремя способами: через
теплопроводность, естественную и принудительную конвекцию и тепловое излучение
(раздел 3.12). При построении простой модели с сосредоточенными параметрами для
определения изменения температуры объекта можно воспользоваться первым законом
термодинамики, по которому скорость изменения внутренней энергии тела равна
разности втекающего и вытекающего потоков тепла, что очень напоминает задачу об
уровне воды в резервуаре, когда в одну трубу вода заливается, а из другой
сливается. Тогда тепловой баланс можно выразить в виде уравнения:
Электрические элементы Существуют три основных электрических элемента: конденсатор, катушка индук-тивност и резистор. В таблице 3.4 приведены основные уравнения, описывающие поведение идеальных элементов. Эти уравнения получены из законов Кирхгофа, выведенных из закона сохранения энергии: Первый закон Кирхгофа: Полный ток, втекающий в узел, равен сумме токов, вытекающих из него (т.е. алгебраическая сумма токов в узле всегда равна нулю) Второй закон Кирхгофа: В замкнутой электрической цепи алгебраическая сумма напряжений на всех участках цепи равна величине приложенной э.д.с. Предположим, что датчик можно представить в виде схемы, отображенной на рис. 3.50Б. Для нахождения уравнения этой схемы воспользуемся первым законом Кирхгофа, который часто называют законом токов. Отметим, что каждый элемент в этом уравнении имеет размерность тока — Ампер (А). Аналогии В предыдущих разделах механические, тепловые и электрические элементы рассматривались по отдельности. Однако, если посмотреть на динамические уравнения этих элементов, можно заметить их схожесть. Поэтому возможно, к примеру, взять механический или тепловой элемент, построить для него эквивалентную электрическую схему и анализировать ее при помощи законов Кирхгофа. В таблице 3.4 приведены сосредоточенные элементы механических, тепловых и электрических схем совместно с уравнениями, описывающими их поведение. Для механических компонентов использовался второй закон Ньютона, а для тепловых -закон охлаждения Ньютона. В первой колонке таблицы 3.4 даны линейные механические элементы и их уравнения, выраженные через силу (/)• Во второй колонке приведены линейные тепловые элементы и их уравнения, выраженные через тепло (Q) А в третьей и четвертой колонках даны электрические аналоги элементов, приведенных в первых двух столбцах. Эти аналоги (конденсатор, индуктор и резистор) описаны с помощью выражений для напряжения и тока. Приведенные аналоги могут применяться при оценке параметров сенсоров, а также промежуточных тепловых и механических элементов между объектом и окружающей средой. ОПТИЧЕСКИЕ КОМПОНЕНТЫ сенсоров Свет может преломляться, отражаться, поглощаться, интерферировать, поляризоваться и распространяться. Все эти явления могут использоваться для построения разнообразных сенсоров. Для управления светом применяются специальные оптические устройства, которые описываются в этой главе с точки зрения геометрической оптики. Это значит, что свойства света, подробно изучаемые в квантовой механике и квантовой электродинамике, здесь рассматриваться не будут. Волновые свойства света будут также игнорироваться. Есть несколько способов генерации света. Существуют естественные источники света, некоторые из них могут быть встроены в измерительные устройства. Самыми крупными естественным световыми источниками являются астрономические объекты, такие как Солнце, Луна, звезды и т.д. К естественным источникам света также относятся все материальные объекты, излучающие то или иное количество тепловой энергии, зависящее от их температуры (см. третью главу). К таким объектам относится пла— мя, экзотермические химические реакции, живые организмы и другие естественные источники тепла, температура которых отличается от окружающей, и чье тепловое излучение может избирательно детектироваться оптическими приборами. Искусственные источники света — это нити накаливания электрических ламп, светоизлучающие диоды (СИД), газоразрядные лампы, лазеры, лазерные диоды, нагреватели и охладители. На рис. 4.1 отображено несколько примеров систем управления светом в датчиках. Большинство этих методов основаны на изменении направления света, другие — на избирательной фильтрации определенных длин волн (рис. 4.1А). Свет в этой главе представляется в виде движущейся фронтальной поверхности или в виде луча, перпендикулярного этой поверхности. Для того чтобы эти допущения были справедливы, оптические элементы, геометрические размеры которых намного меньше длины волны, учитываться не будут. к примеру, если в оконном стекле есть небольшие включения субмикронного величины, они будут полностью проигнорированы в ходе всех геометрических вычислений в любом диапазоне длин волн. Другим примером является дифракционная решетка. Ее поведение не может быть описано методами геометрической оптики. В таких случаях необходимо применять методы квантовой электродинамики. В этой главе рассматриваются только те оптические элементы, которые наиболее часто используются для построения сенсоров. Более подробную информацию по вопросам геометрической оптики можно найти в специальной литературе (к примеру, [1]). Перед тем как управлять светом, его сначала надо получить. Изменение направления света осуществляется за счет таких физических явлений как отражение при помощи зеркал, дифракционных решеток, оптических волноводов и оптоволокон и отклонение при пропускании лучей через линзы, призмы, химические растворы, кристаллы, органические материалы и биологические объекты. При прохождении света через такие объекты из-за воздействия внешних факторов может произойти изменение некоторых его параметров, таких как: интенсивность, направление распространения, поляризация, спектральный состав, и даже таких как: скорость света и фаза его волны. Задача разработчиков сенсоров заключается в том, чтобы научиться определять количественное изменение этих параметров и соотносить полученные результаты с величиной внешних воздействий. 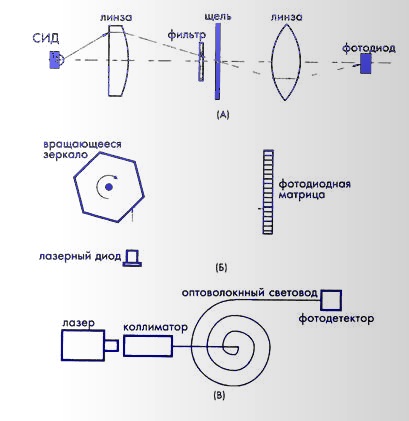 Рис. 4.1. Примеры оптических систем, построенных на основе:
отклонения (А) и отражения (Б, В) лучей света
Рис. 4.1. Примеры оптических систем, построенных на основе:
отклонения (А) и отражения (Б, В) лучей света
.
Информация исключительно в ознакомительных целях. При использовании материалов этого сайта ссылка обязательна.Правообладатели статей являются их правообладателями. |
По вопросам размещения статей пишите на email:
|
